Leaderboard

Popular Content
Showing content with the highest reputation since 07/27/2026 in Posts
-
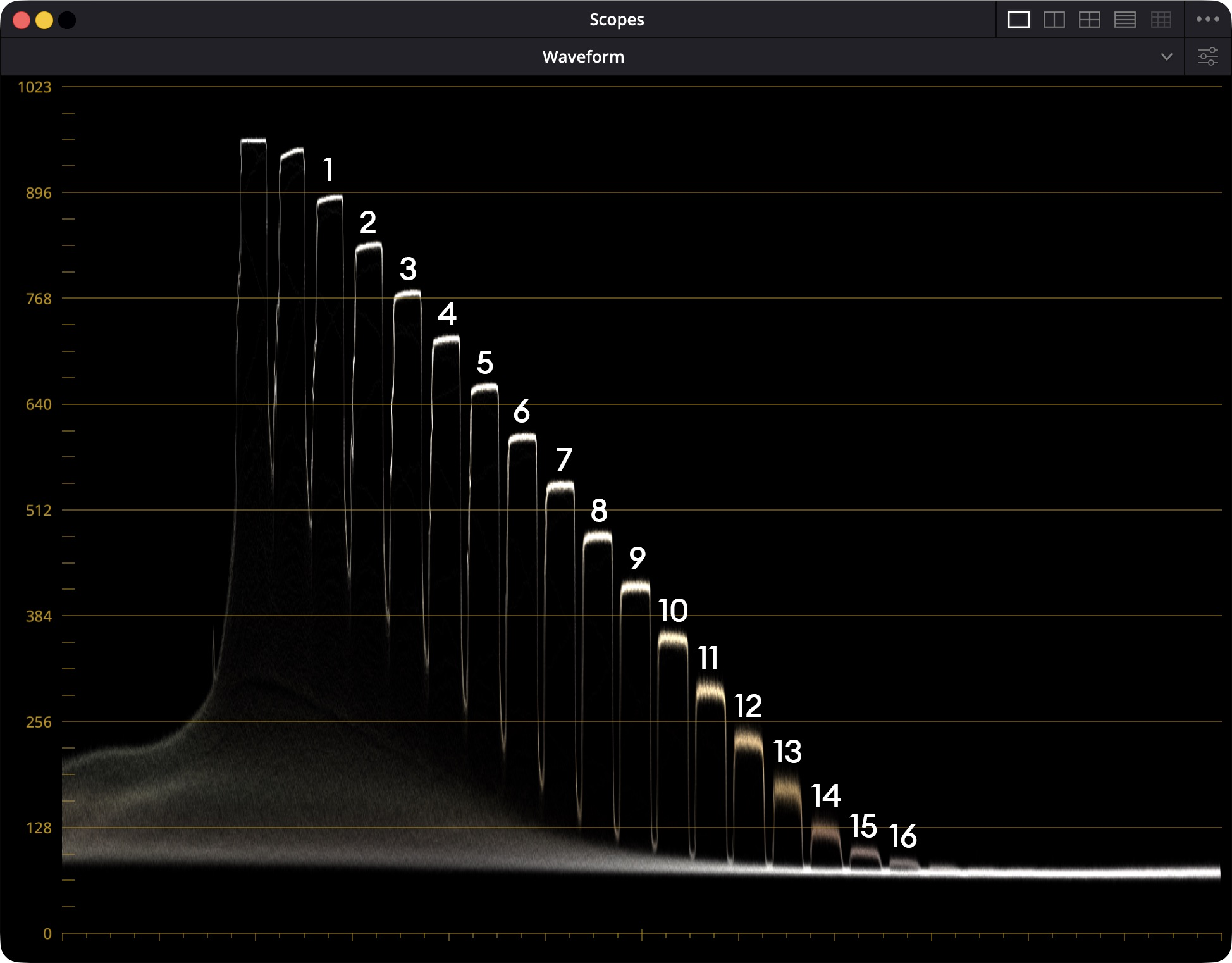
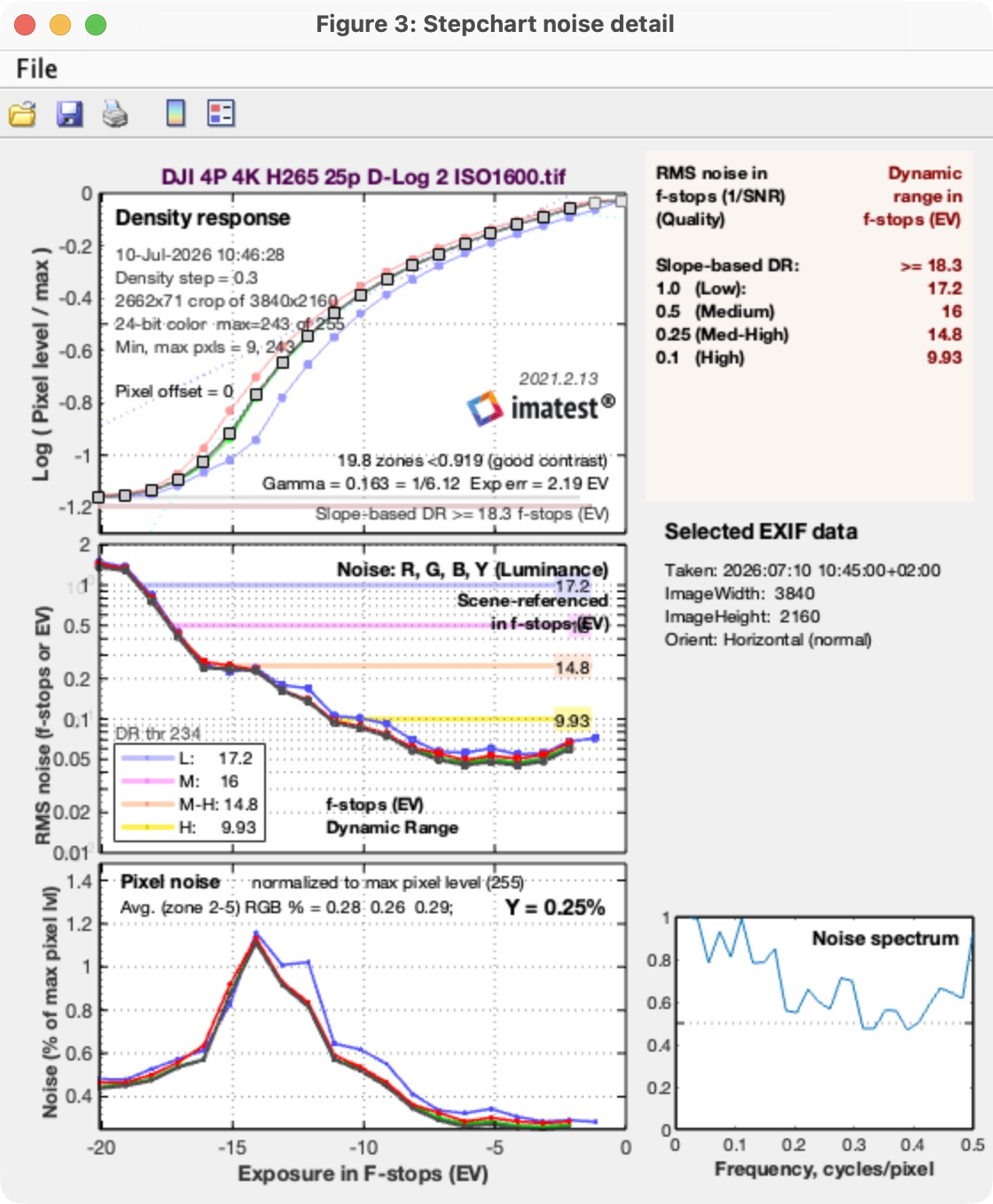
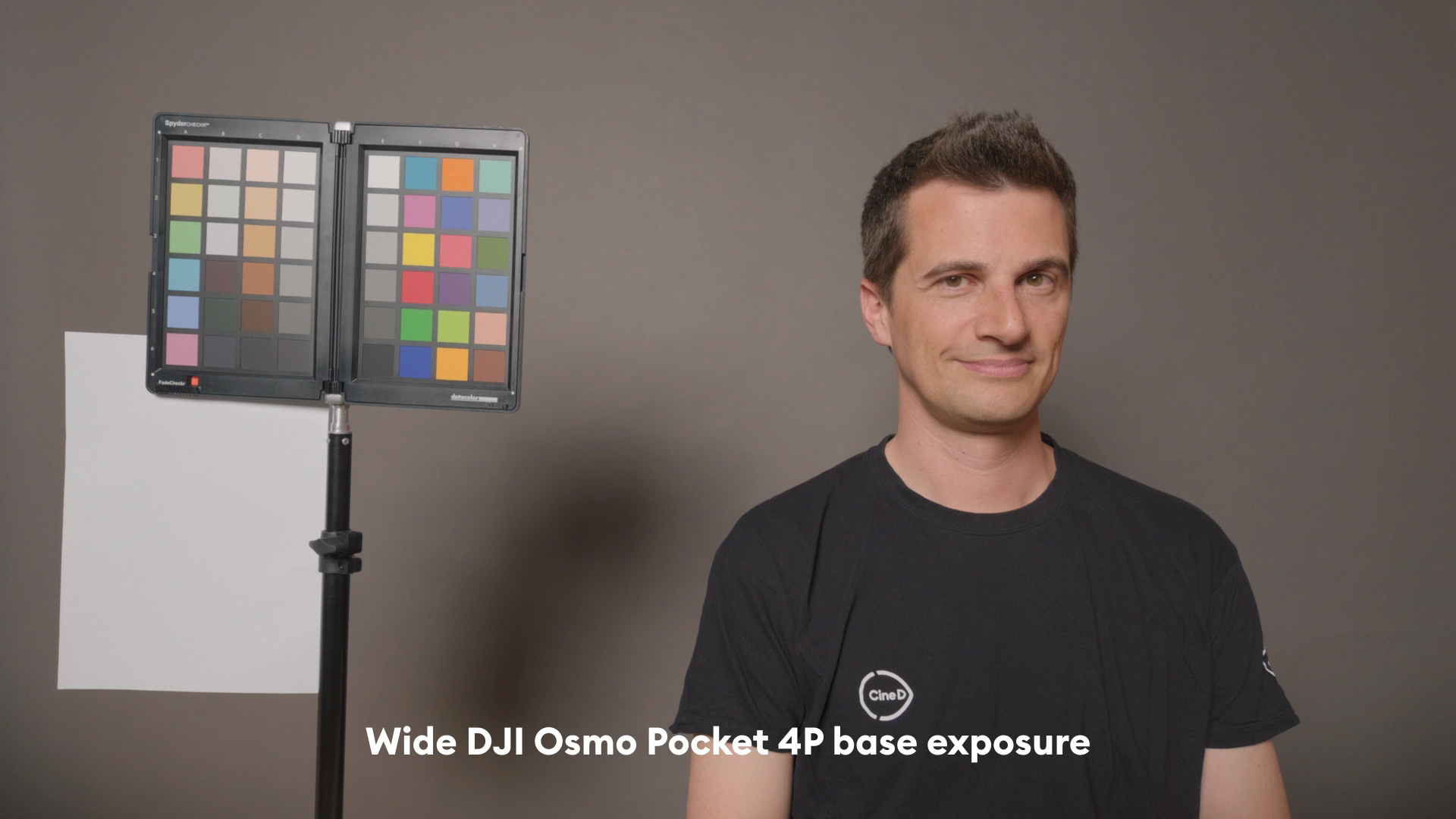
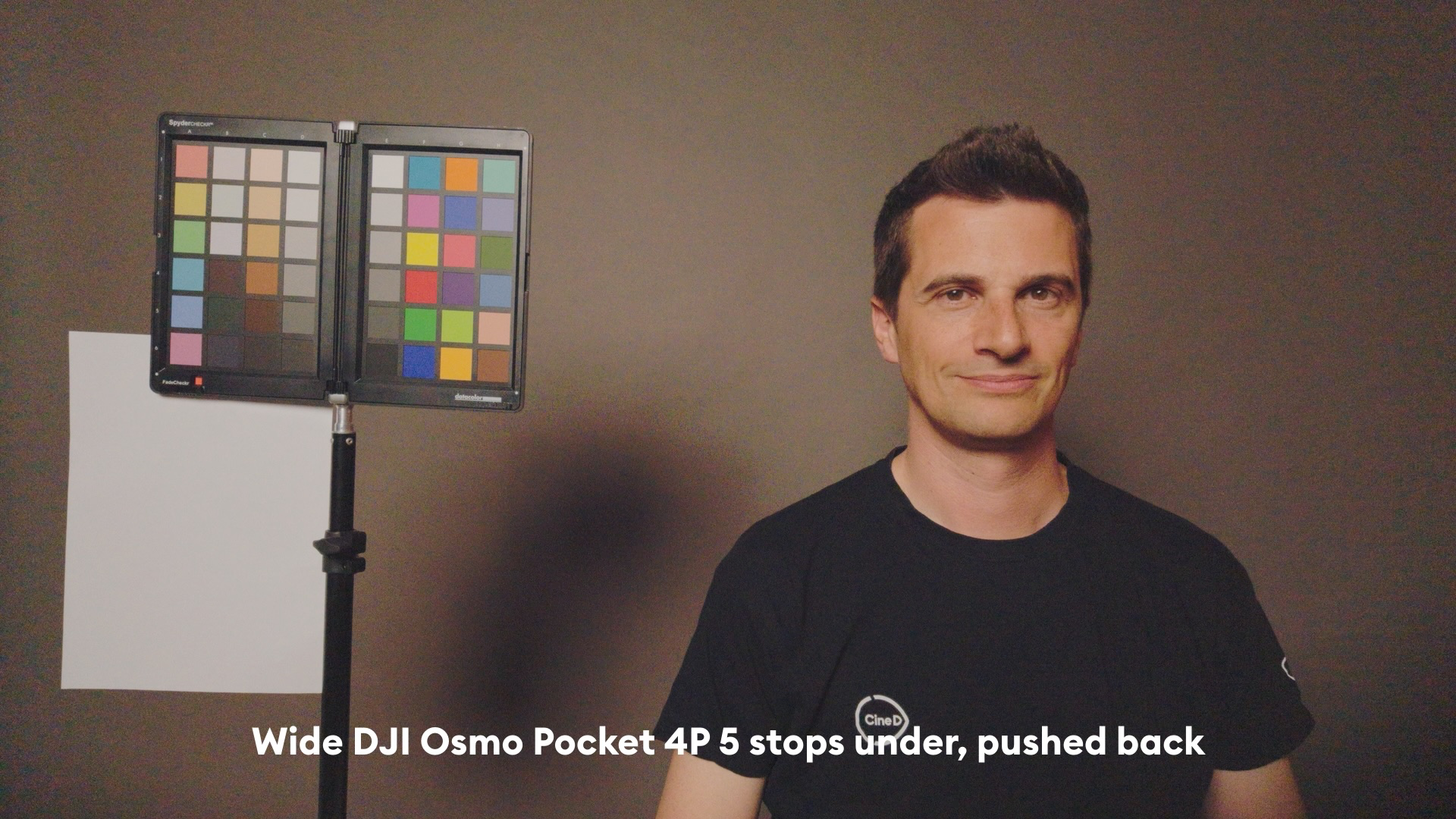
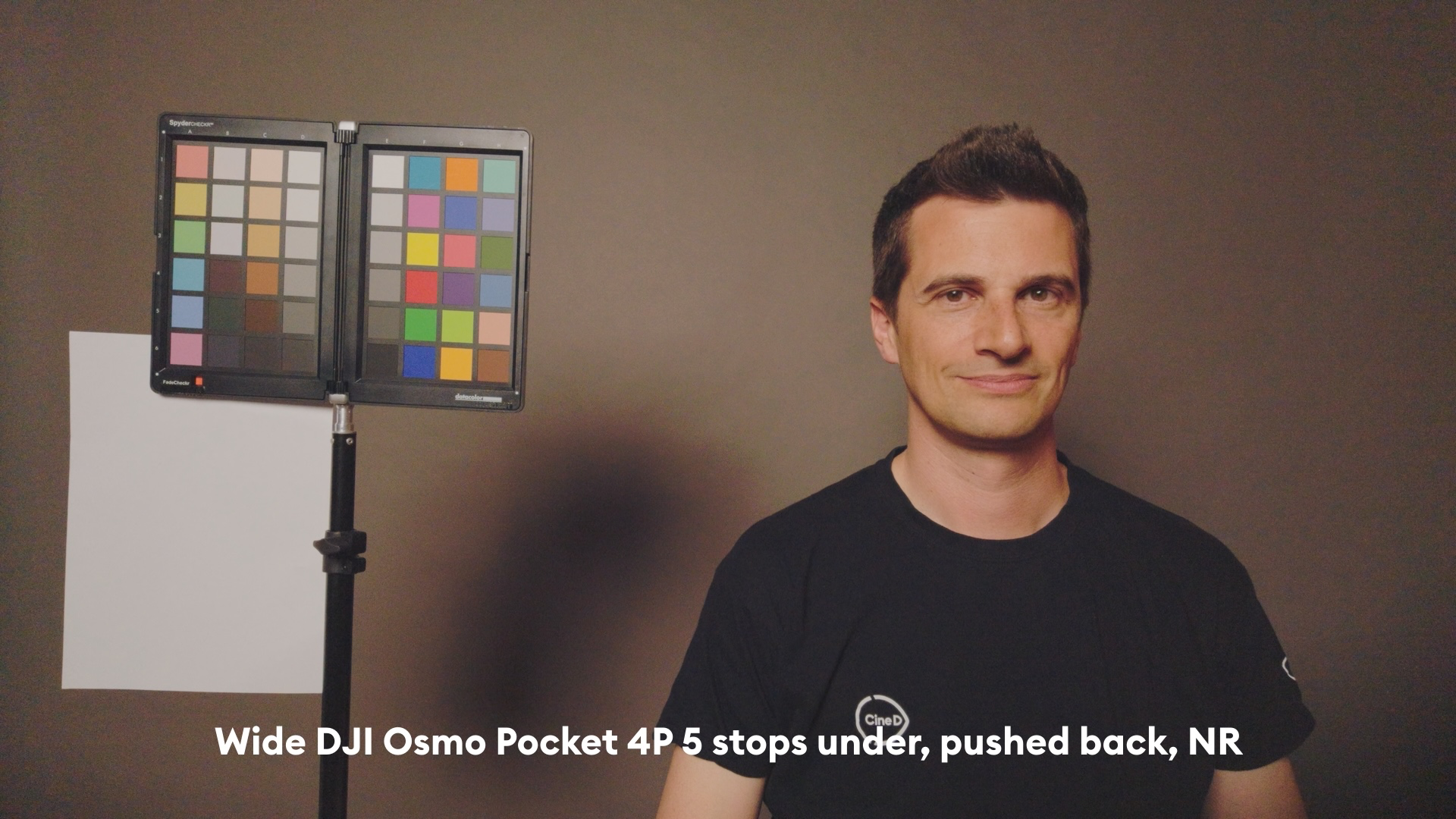
Cined just published their tests of the DJI OSMO Pocket 4P camera, with the new LOFIC sensor, and oh boy does it deliver! Highlights from their testing (of the wide camera): 16 stops at SNR=2, and 17.2 stops at SNR=1, with no internal NR (better than the Alexa 35 and any other camera they've ever tested) 10+ stops of latitude (second only to the Alexa 35) and potentially limited by the 10-bit codec and maybe not the sensor 11ms rolling shutter (not bad, and better than DGO designs) Their studio lights weren't powerful enough to clip the sensor, it has that much DR! The telephoto camera from the DJI isn't a LOFIC sensor and despite testing very well it's not at the same level of performance. The full test: https://www.cined.com/dji-osmo-pocket-4p-lab-test-rolling-shutter-dynamic-range-and-exposure-latitude/ In watching their podcast presentation they revealed a bunch of other interesting info: This is the first of these (tiny consumer) devices that isn't trying to adapt itself to the scene, so it's a "real camera" in the sense that it's not heavily processing things They mentioned they had the iPhone 17 Pro in for testing and even when it was in full manual mode, just by moving the focus point it would change the test results etc As the main DJI camera is ~20mm FOV, they had to develop a new testing setup so the bright patches of the Xyla didn't reflect from the camera onto the dim patches etc LOFIC sensors are likely to be coming into smartphones soon, as this is where the money is in the R&D Sony are working on a smaller version of a LOFIC sensor which would be suitable for smartphones and also for the telephoto camera on the DJI Also, the OG BMPCC got a mention, as they were talking about how it would be great to have such a sensor in a "real" camera body and with interchangeable lenses etc, but MFT sensor size isn't that far away from this, so that could also happen too. Panasonic went DGO and maybe would do this too.. I'm stoked for the GH8!! Just incredible, and I second the idea of fitting one of these to a body like the OG BMPCC! Images. Waveform plot for the DJI OSMO Pocket 4P 20mm wide D-Log2 ISO1600 Imatest result for the 20mm wide camera, D-Log2 at ISO1600 Latitude tests of the wide camera: The 4-stop over, which due to their lighting restrictions was still probably 1-2 stops from clipping:
 4 points
4 points -

LOFIC sensors are the future...
sanveer and 2 others reacted to MurtlandPhoto for a topic
I’m getting a Pocket 4p in hand in the coming days. Looking forward to seeing how it matches up with the S1ii and Pyxis 12K. The videos I’ve seen truly are remarkable.3 points -
AFAIK Panasonic don't use Sony for all of their sensors - they've implied the GH6/GH7/G9ii sensor is not from Sony (I think the words were 'it's not made by who you think it is' in response to a question at a launch event). OmniVision are also in the LOFIC game - the OV50X50 is a 50MP 1" sensor with both dual-gain and LOFIC - https://www.ovt.com/products/ov50x50/ 'TheiaCel® technology' is their version of HDR capture including LOFIC - https://www.ovt.com/technologies/theiacel-technology/2 points
-

Smallest real 720p or 1080p P&S camera?
ac6000cw and one other reacted to fuzzynormal for a topic
The GM1 is long gone, but here's the tiny a110 lens: FWIW, my wife and I made a doc 10 years ago using the GX7 and the GM1 (with a different lens). It was fun. I did use the a110 primes I have for a short film. Finally, I also have the a110 Pentax film camera and have started shooting with it just for kicks.
2 points -

Sony FX5
kye and one other reacted to newfoundmass for a topic
Sorry if I misread! I have! And it's TOO smooth for my tastes. It's very impressive, but I still want some natural handheld movement. It helps with the immersion. It's why I have never used a gimbal for the ringside action. The biggest issue with action cameras, even the new ones, is the low light just isn't great in most of these venues that don't have professional lighting rigs set up.2 points -

Smallest real 720p or 1080p P&S camera?
Andrew - EOSHD and one other reacted to BTM_Pix for a topic
The LX10/LX15 is a solid little camera. The big differentiator (aside from price) over the Sony 1” cameras is the f1.4 aperture at the wide end. That comes with a couple of caveats in that it doesn’t stay f1.4 very far into the range and shooting in 4K there is a bit of a crop. It takes my cinelike-D hack and I also put a magnetic filter thread on mine that enables you to put ND on it and/or in my case a Sony 2x TC that you can quickly pop on and off to extend the range. These are some grabs from mine. The top panel is lens at it’s widest, the middle is maximum zoom and bottom is maximum zoom with the TC on. If you want to have one with a natural long zoom range on it then their other 1” from the time the TZ100 has a 10x optical zoom. Can also take the cinelile-d hack.
2 points -
Sony FX5
kye and one other reacted to newfoundmass for a topic
For fast action sports where you're moving quickly it's just not sufficient from what I've seen. If you're largely standing still I imagine it's sufficient but when you're running around a wrestling ring, not so much. My use case though is admittedly unique.2 points -
L10 update… Shot 5x wedding ceremonies plus their day prior & post events exclusively on the L10. Stills only so far… The experience and results have been great. Not S1Rii great or even S9 great (but in isolation more than good enough as a back up camera stepping up to do a job) the latter of which is supposed to be my back up camera but was in the shop being supposedly fixed…but as it turned out the fix was going to cost more than buying another mint used one, I bought another. Also one week long family adventure as my sole camera. Also perfect for that. However, now that I am back with 1.5x S9 camera bodies, I have decided to repurpose the L10 as; personal plus back up plus dedicated gimbal unit. Bought my 4th gimbal but this time determined to actually use and keep it…my previous issues being a combo of; reliability, weight, too much kit, user ineptitude…but as it’s an RS4 Mini with the tracking unit and L10, it should be a pretty sophisticated and lightweight unit. Only 3x more jobs that have video this year but at least it will be a good test ahead of 2027 where every job is hybrid. Should be GH7 level results, albeit with a fixed lens and the lack of IBIS the L10 has removed and improved…1 point
-

Smallest real 720p or 1080p P&S camera?
kye reacted to Andrew - EOSHD for a topic
Real 1080p on compacts is a unicorn. None of them do it, they are all pixel binning the 1080p and 720p. There's a wide variance in binned image quality though - some pixel binning techniques get close to native res 1080p. Pixel binning works well on the RX100 M1/M2, these use a good sampling method. Cleanest 1080p for the price, with the fast aperture zoom and the size is as small as it gets. The RX100 M4 or newer got the fast stacked sensor, so they CAN do a full pixel readout for 4K, no crop, but the 1080p is still binned. LX15 I can recommend as an all-round stills compact with 4K, but it still cannot sample the full width for a full pixel readout, the 4K is a crop and the 1080p is binned. I never used it for 1080p so can't vouch for the binning quality. I always 4K'ed it.1 point -
 Good discussion and I think this cuts to the heart of how different the thought process really is. If I'm shooting in public with a single prime then this is how I am thinking about it: - I have a fixed FOV, but I can move around and closer/further and when I do that I change all of the following at once: - the size of the subject in the frame - the perspective I have on the subject - the size and position of the subject compared to the items in the foreground and background - my distance to the subject - my influence on what I am shooting - So I visualise the situation in 3D and estimate where I need to move to create the composition I want - I move there and refine the camera position and take the shot If I'm shooting in public with a zoom then this is how I am thinking about it: - I have a flexible FOV and I can move closer/further so when I do that I can: - zoom, which changes the size of the subject and foreground and background in the frame without changing their relationships, or my distance, or without changing my influence on the subjects - move, which changes the perspective I have on the subject and therefore the relationships of the objects in the scene to each other, and it changes the subject distance and my influence on what I am shooting - So I visualise the situation in 3D and estimate a line/cone of positions I can be in to create broadly the composition I want through varying combinations of focal length and my position - I weigh up my priorities, trading subject distance, my influence on the subject/scene, and composition against each other to work out what I think is the best balance - Depending on the layout, I also consider how fast I can get there compared to what is happening in the scene - I move there and refine the camera position and zoom simultaneously, and take the shot One is starting with a single FOV and working from there, the other is starting with an infinite number of FOVs. The thinking is completely different. When I'm using a prime the idea of zooming is completely alien and when I am using a zoom the idea of there being set focal lengths is completely alien. It's like I have two programs in my head, one for primes and one for zooms, and I just run the appropriate one for what lens I am using at the time. The idea of taking a zoom and limiting it to preset lengths might seem like a miracle compared to having a prime, but it's a disaster compared to having a zoom lens. I spoke more about this in my dedicated thread about it, and once you start thinking beyond composition and into aesthetics and tone the idea that a 35mm vs 50mm FOV are 'similar' is about as ridiculous as a photo editor only allowing you to crop the image by 0% or 30% (this is the difference in FOV between a 50mm and a 35mm). I'm sure you're aware of these fundamental differences from your own shooting and you'll have been doing all this consciously or unconsciously. If you start from a technical perspective then a zoom is just like a set of primes, but from a creative perspective it's nothing like a set of primes whatsoever.1 point
Good discussion and I think this cuts to the heart of how different the thought process really is. If I'm shooting in public with a single prime then this is how I am thinking about it: - I have a fixed FOV, but I can move around and closer/further and when I do that I change all of the following at once: - the size of the subject in the frame - the perspective I have on the subject - the size and position of the subject compared to the items in the foreground and background - my distance to the subject - my influence on what I am shooting - So I visualise the situation in 3D and estimate where I need to move to create the composition I want - I move there and refine the camera position and take the shot If I'm shooting in public with a zoom then this is how I am thinking about it: - I have a flexible FOV and I can move closer/further so when I do that I can: - zoom, which changes the size of the subject and foreground and background in the frame without changing their relationships, or my distance, or without changing my influence on the subjects - move, which changes the perspective I have on the subject and therefore the relationships of the objects in the scene to each other, and it changes the subject distance and my influence on what I am shooting - So I visualise the situation in 3D and estimate a line/cone of positions I can be in to create broadly the composition I want through varying combinations of focal length and my position - I weigh up my priorities, trading subject distance, my influence on the subject/scene, and composition against each other to work out what I think is the best balance - Depending on the layout, I also consider how fast I can get there compared to what is happening in the scene - I move there and refine the camera position and zoom simultaneously, and take the shot One is starting with a single FOV and working from there, the other is starting with an infinite number of FOVs. The thinking is completely different. When I'm using a prime the idea of zooming is completely alien and when I am using a zoom the idea of there being set focal lengths is completely alien. It's like I have two programs in my head, one for primes and one for zooms, and I just run the appropriate one for what lens I am using at the time. The idea of taking a zoom and limiting it to preset lengths might seem like a miracle compared to having a prime, but it's a disaster compared to having a zoom lens. I spoke more about this in my dedicated thread about it, and once you start thinking beyond composition and into aesthetics and tone the idea that a 35mm vs 50mm FOV are 'similar' is about as ridiculous as a photo editor only allowing you to crop the image by 0% or 30% (this is the difference in FOV between a 50mm and a 35mm). I'm sure you're aware of these fundamental differences from your own shooting and you'll have been doing all this consciously or unconsciously. If you start from a technical perspective then a zoom is just like a set of primes, but from a creative perspective it's nothing like a set of primes whatsoever.1 point -
It depends on the range really. A 24-70mm is definitely 3-4 primes for me but something like the Canon 35-350mm is a different animal. Leica used to do these two lenses They are referred to as MATE (Medium Angle Tri-Elmar) and WATE (Wide Angle Tri-Elmar) and are “zoom” lenses with fixed focal length stops. The MATE is stepped at 28-35-50mm and the WATE at 16-18-21mm which on their intended use (Rangefinders) were used with a specific ad on viewfinder that was so clunky it is known as the Frankenfinder. They are not fast but are compact and have focal length stops that make sense so are very much a bag of primes (and very much more useful adapted on to an EVF body). Some Panasonic fixed lens cameras (LX10 and LX100 spring to mind) emulate this by allowing you to use the zoom ring to increment to fixed focal lengths and it is a good feature especially on those with return to position on power on functionality. I *think* some of the Sony RX100 do this as well.
1 point
-
Apparently Sony is working on a smaller LOFIC sensor now, so swapping to LOFIC may well mean sticking with Sony, especially if you already have a deal of some kind worked out.1 point
-
I suggested in the other group that Panasonic should put LOFIC sensors in their ILCsand someone went on about mythical organic sensor, which quite frankly may remain just that. Panasonic should just put LOFIC sensors in all their new cameras, and ditch Sony if it doesn't improve sensor tech enough. I would love to see an Even Smaller GX camera with a 20-50MP 1inch LOFIC sensor. The LX10 is frankly too large for most pockets.1 point
-
It lets them hit attractive spec points like 3x optical zoom and 12x zoom when using the digital shenanigans. Although the 3x optical zoom is actually 3x switch as the intermediate points are digital and if you are in D-Log2 then it’s a hard switch as there is no digital zoom. I think 45mm equivalent would’ve been better from a practical point of view but 2.25x optical zoom and 9x total zoom doesn’t look as good in the marketing. Even though 20-190mm equivalent is still not too shabby ! A good practical look at the challenges around shooting with it in this video.1 point
-
 There are already wide converters to put on the 20mm lens. How long until someone releases one for the 60mm tele. You could sell a set of 30 / 40 / 50mm attachments. Or a tele converter to turn the 20mm lens into 60mm and then you can keep D-Log2.1 point
There are already wide converters to put on the 20mm lens. How long until someone releases one for the 60mm tele. You could sell a set of 30 / 40 / 50mm attachments. Or a tele converter to turn the 20mm lens into 60mm and then you can keep D-Log2.1 point -
I agree about it being too smooth, especially because the position of the camera isn't stabilised so there can be huge parallax movement which clashes with there being no movement in the direction of the camera at all. I raised the topic because it would be interesting to see a combination of OIS + IBIS + Super EIS where the EIS smoothes the motion rather than locking the image completely. It's much harder to get the locked stabilisation than just smoothing it and leaving some of the motion in the image, so it's definitely possible to tone it down a lot. Perhaps this topic will be what people are arguing about when the GH10 and FX5 IV and R5 mk 5 are all being released on top of each other, so we've got to leave something on the table for then!1 point
-
You could add the Sony ZV-1 to the list (original version, which has lens OIS) - it's basically the same size and weight as the RX100 V but more video orientated. I own both the ZV-1 and an HX99 (which is tiny, shoots 4k up to 30p, with a pop-up EVF and a fantastic zoom range for a camera that small - helped at the long end by only having a 1/2.3″ sensor, of course). Unless you really need the zoom range or EVF, the ZV-1 shoots better video (with a mic jack too) and very nice stills. You can also get a JJC stick-on 52mm filter adaptor for it - https://www.amazon.co.uk/dp/B07GWQ6CXL (The Sony menu system will annoy you though if you're used to Panasonic cameras...)1 point
-

Sony FX5
newfoundmass reacted to Emanuel for a topic
Actually, I was making exactly the opposite point from the one you made it sound as though I was making : D when I mentioned Lumix alongside the Oly case ; ) The other point is simply that one lens isn’t necessarily the same as another ; )) While much also depends on the way the operator handles the camera, a lens with optical stabilisation can make a night-and-day difference... speaking as someone who uses glass with and without it every day on the FX series :- )1 point -
Sony RX0 is reasonably small. Not a zoom however and you might regard it as an “action cam” (albeit without stabilisation it isn’t!).1 point
-
Smallest real 720p or 1080p P&S camera?
kye reacted to fuzzynormal for a topic
My user icon here on EOSHD is a GM1 with a tiny Pentax A110 24mm prime lens on it. Aside from using a flat-f8-body-cam-pancake-lens, this was as about as small as I ever got things. Which was pretty small!1 point -
Never tried it but I suspect the FX30 stab would be good enough for my handheld needs which are basically ‘static’. I move more and more however towards the combo of absolutely locked off or floating moving with nothing in between. Lumix are great in this regard because if you have everything dialled up to the max, albeit at the expense of some cropping, these things stay incredibly still. It’s really only if there is any static foreground that you notice any movement so wider establishing shots, I always use a tripod or something.1 point
-
I bought one and ended up selling it. While the RED NE looks great, it's way to much data for what I shoot and the H265 is terrible, I can't understand how Nikon does not understand the urgency of fixing it.....1 point
-
It's funny, I'm pretty aligned with your thoughts, just like you, I'm on the back end of my commercial life (went full time in 1993) and have always been pragmatic with gear. I want to splash out once before it's not relevant anymore! I too am shooting on the S1R2 and love the files out of it. And yes if I ever get an SL3P, the first thing is to black out, sorry stealth out the white Logo 🙂1 point
-

Sony FX5
KnightsFan reacted to Benjamin Hilton for a topic
This is a beast of a camera for sure, but man, almost $5K??? I mean, I get it, it's almost a cinema camera, but no internal ND, SDI etc.... I guess I'm just grateful you can pick up a used A7SIII for around 2K and get basically the same image at the end of the pipeline. Or even an old F5 at $1k for that matter... It's funny because I'm at the stage in my career where I can kind of choose to shoot with whatever cameras we want within reason. More often than not though, I end up going with older cameras because we get basically the same image at end of the pipeline, and they are like 10x cheaper. The budget saved can be invested into cooler on camera stuff. Spoiled for choice I guess1 point